The field of architecture is one in which the freedom of design and the rigor of engineering appear equally. While everyone can see the beautiful exterior of a new building, few truly understand the complicated analysis involved in making that building stand. Ubiquitous in the more technical aspects of structural design, calculus is used in architecture in many different and surprising ways.
One of the most important concerns in architecture is the structural integrity of a building. When drawing up the blueprints for a bridge, for example, an architect must ensure that their design can sustain more than enough weight in order to have it implemented. Calculus enables architects and engineers to analyze the forces acting on various structural elements, such as beams, columns, and trusses. With differential calculus, architects can model the behavior of these elements under different loading conditions, ensuring they can withstand the forces they will encounter in various scenarios.
When a problem is too difficult for an analytical approach (solving equations with variables), numerical calculus can be used, relying on computer models to approximate solutions. It is often used to model a design’s resistance to stresses like weight, weather, and earthquakes. Once architects have developed a model that can incorporate many of these variables, they can easily test different designs and generate new and improved models.
Optimization is a notable feature of calculus that is frequently used by architects to find the most efficient designs without having to go through trial and error. The goal is to maximize beneficial qualities like the strength and stability of a building while minimizing detrimental qualities like the quantity of materials used and cost.
One example of an optimization problem that can be solved directly using calculus is the simultaneous maximization of strength and minimization of material (which is usually interchangeable with cost). Suppose we have a beam that needs to span a distance of \( 10 \) meters (m) and support a uniformly distributed load of \( 5 \) kilonewtons per meter (kN/m). The architect’s goal is to minimize the total volume of material used in the construction of the beam while ensuring it meets the strength requirement, perhaps with a maximum allowable stress of \( 100 \) megapascals (MPa).
Assuming the beam has a rectangular cross-section, we will need to use the concept of maximum bending moment. When a beam bends from carrying weight, the material at the top will experience compressive stress, while the material closer to the bottom will experience tensile stress. The maximum bending moment is a formula that gives us the stress at the center of the beam under a certain type of pressure (in our case, it is uniform).
In the table below, the left column pictures the beam orientation and stress, the middle column gives the maximum bending moment formula, and the right column depicts the corresponding annotated graph. Each graph is measured in bending moment (kNm) by length (m).
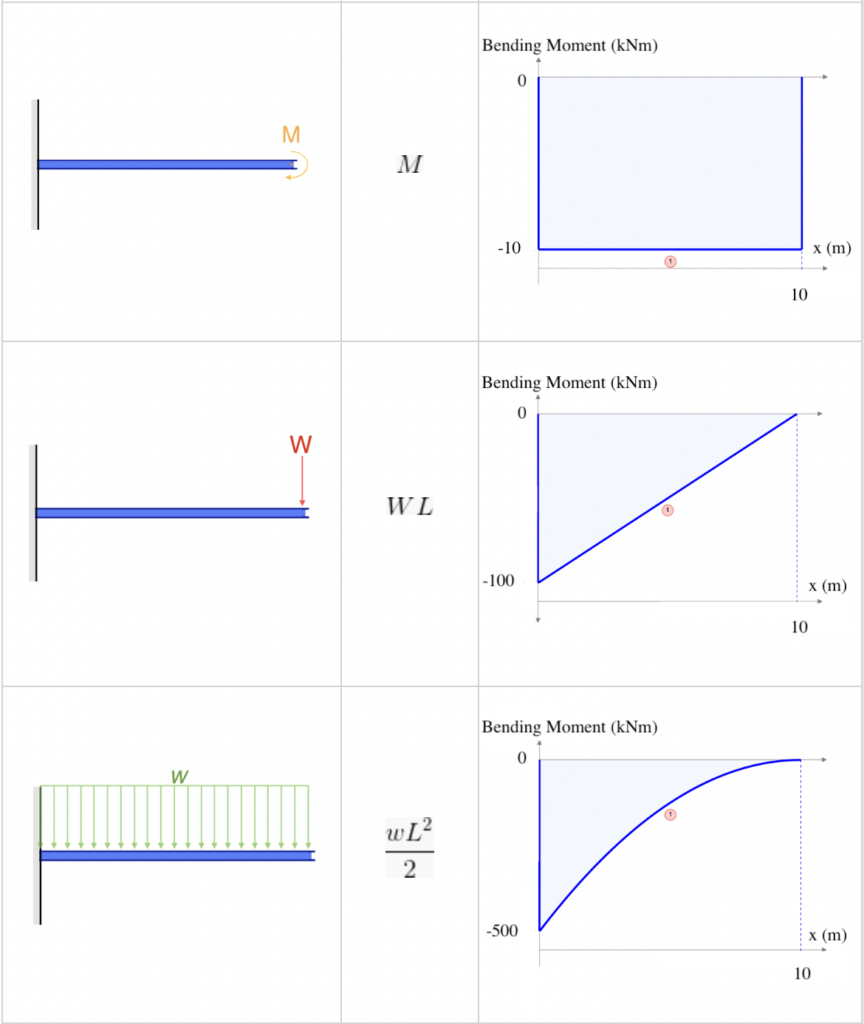
![]()
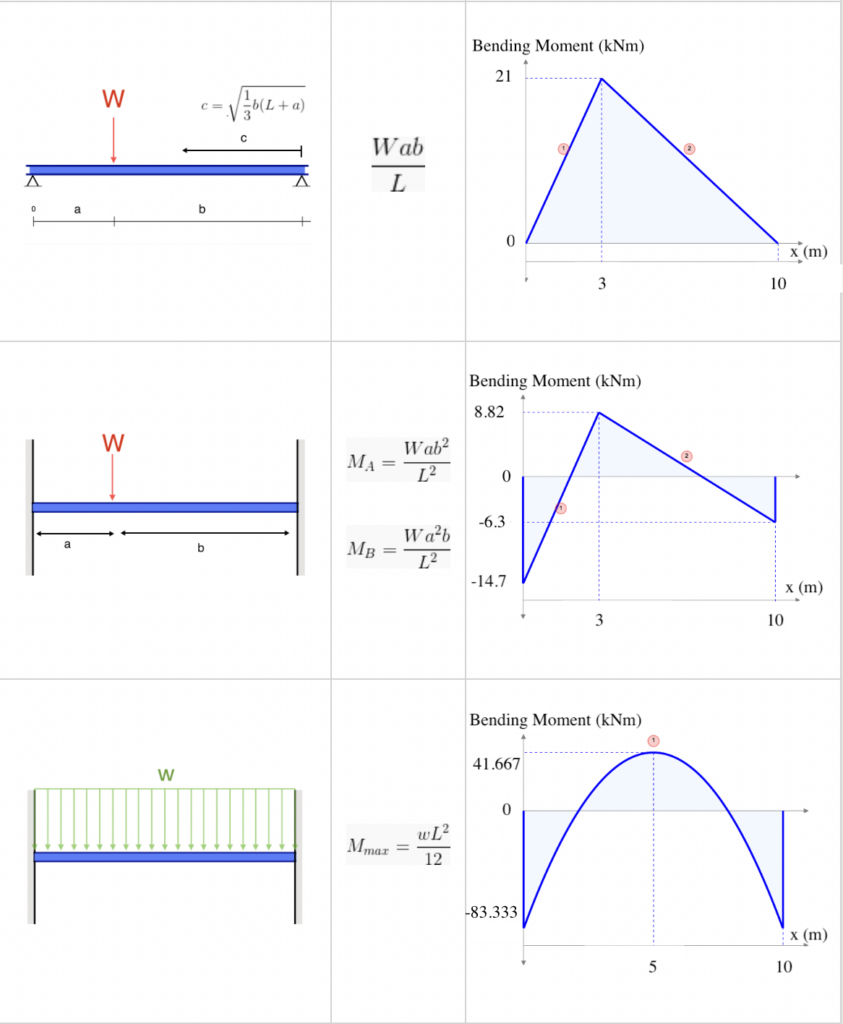
Image source – https://skyciv.com/docs/tutorials/beam-tutorials/bending-moment-equations/. Used with permission from SkyCiv.
The maximum bending moment for a rectangular beam (supported on both ends) under uniformly distributed stress is
\( M_{\text{max}} = \dfrac{W \cdot l^2}{12} \)
where \( l \) is the length of the beam, and \( W \) is the weight or load. Using the values given in the problem, we have that:
\( M_{\text{max}} = 62.5 \, \text{kNm} \)
To find the maximum allowable stress, we use the following equation:
\( \sigma_{\text{max}} = \dfrac{M_{\text{max}}}{S} \)
with \( S \) representing the section modulus and given by
\( S = \dfrac{w \cdot h^2}{6} \)
In this formula, \( w \) represents the width of the beam and \( h \) represents the height—both variables we are trying to optimize. To solve the problem now, we need to minimize \( V = w \cdot h \cdot l \) subject to the condition that
\( \sigma_{\text{max}} \leq 100 \, \text{MPa} \)
After solving, the architect will find that the optimal dimensions for their beam spanning \( 10 \) meters and subject to a maximum stress of \( 100 \) MPa are \( 0.5 \) meters by \( 1 \) meter.
Though this specific example is relatively simple compared to some of the work architects and structural analysts do every day, it represents a common type of optimization in architectural design. While we were able to solve the example analytically, problems regarding more complicated structures or more variables might not be solvable analytically. This is where computer models excel—numerical methods often help to get “good enough” approximations. They can even be used to simulate a structure’s response to complicated environmental factors like earthquakes or hurricanes!
Many architectural designs feature curved surfaces and uncommon shapes, from sweeping arches to intricate facades. To analyze these structures, architects use calculus to estimate surface areas, volumes, curvature, and other geometric properties, enabling them to properly adjust their designs.
Usually, however, this type of calculus is concerned with 3D shapes—something not covered in single-variable calculus. In order to find the equation of a flat roof, for example, we need to describe a plane. The general form of a plane is similar to that of a line because they are formed by nearly the same process. To get a line, we can plot two distinct points and then connect them. To get a plane, we connect three points that can’t already be connected with one line. This process is called “generalizing” the line to a higher dimension. If we introduce a third axis, \( z \), a plane can be represented by the following equation:
\( Ax + By + Cz = D \)
To find this equation, consider how we might form a plane. Like a piece of paper, it is a completely flat surface that has some useful properties despite its simplicity. Imagine holding a pencil against the paper so that the eraser is flat and in contact with the page. Then, think of all the possible ways to make a right angle with the pencil as one ray by drawing one line on the piece of paper with an endpoint at the eraser of the pencil. If you draw all such lines, you’ll have covered the entire piece of paper. Another way to think about this is to imagine just one line perpendicular to the pencil. Rotating it around in a full circle will not change the angle between it and the pencil, and neither will extending its length.
Now switch back from the paper to the plane and from the pencil and lines to vectors. The important result of this is that the plane (paper) is uniquely defined by the first vector (pencil), which we can refer to as the normal vector to the plane. The collection of all the lines at a right angle to the pencil—which we can think of as the set of all vectors perpendicular to the normal—is equal to the plane.
In formal notation, here are the steps for constructing a plane at a certain angle, “centered” at a certain point (because planes are infinite, it’s not fully clear what the “center” means; here, you can think of it as the point where the normal vector intersects the plane). First, you need one point on the plane,
\( p_0 = (x_0, y_0, z_0) \)
Then, determine the angle of the plane you want by finding a normal vector,
\( n = \langle A, B, C \rangle \)
Like how a line in 2D space is defined by two points, a plane in 3D space is defined by three. We can give the equation of the plane as a condition: if a point satisfies the equation, then it’s on the plane; if not, then it’s not on the plane. To start, we can denote “a point”
\( p = (x, y, z) \)
Then, we can apply the logic of our pencil-paper analogy. Any vector that is perpendicular to the normal vector (connected tail to tail) will lie in the plane. The normal vector’s tail is at \( p_0 \), so any vector whose tail is at \( p_0 \) and is perpendicular to \( n \) is in the plane. Since we’re supposing that the arbitrary point \( p = (x, y, z) \) is on the plane, the arbitrary vector between \( p \) and \( p_0 \) is also on the plane, notated as
\( v = \langle x – x_0, y – y_0, z – z_0 \rangle \)
Note: We take \( x – x_0 \) instead of \( x_0 – x \) because the vector must be placed with its tail at \( (x_0, y_0, z_0) \).
Now, we just need a mathematical equivalent for “\( n \) and \( v \) are perpendicular.” Fortunately, we have an operation between vectors called the dot product, which represents the (scaled) amount of one vector in the direction of the other. If we shine a light on the vector \( u \) perpendicular to the vector \( v \), we call the shadow that is cast the projection of \( u \) onto \( v \). With some trigonometry, that projection has magnitude \( |u|\cos(\theta) \), where \( \theta \) is the angle between \( u \) to \( v \). The dot product takes into account the size of \( v \) by multiplying this product by \( |v| \) for a final equation of \( u \cdot v = |u||v|\cos(\theta) \). If two vectors are perpendicular, it is clear that projecting one onto the other will give us a new vector of magnitude zero: from the dot product formula, \( \cos\left(\frac{\pi}{2}\right) = 0 \).
With this, we can finally complete the planar equation. If \( n \) and \( v \) are perpendicular, then \( n \cdot v = 0 \). So:
\( \langle A, B, C \rangle \cdot \langle x – x_0, y – y_0, z – z_0 \rangle = 0 \)
Helpfully, the dot product formula has another form. If, in three dimensions, \( u = \langle u_1, u_2, u_3 \rangle \) and \( v = \langle v_1, v_2, v_3 \rangle \), then \( u \cdot v = u_1 v_1 + u_2 v_2 + u_3 v_3 \). Applying this alternate representation, our equation becomes:
\( Ax – Ax_0 + By – By_0 + Cz – Cz_0 = 0 \)
Setting \( D = Ax_0 + By_0 + Cz_0 \), we get the canonical equation of the plane:
\( Ax + By + Cz = D \)
In other architectural calculations, we rely on multivariable calculus because it is the generalization of single-variable calculus to higher dimensions. If we wanted to find the length of a curve in 2D space (called \( \mathbb{R}^2 \) or the real plane), for instance, we would do that with an arc length integral. To find the surface area of a surface in 3D space (called \( \mathbb{R}^3 \) or Euclidean space), we will do that with a similar integral—except because we can move on the surface in two directions, we will use a double integral. The formulae for the arc length \( L \) of a curve \( y = f(x) \) and the surface area \( S \) of a surface \( z = f(x, y) \) are similar:
\( L = \int_a^b \sqrt{1+\left(f’(x)\right)^2}\,dx \)
\( S = \iint_D \sqrt{1+(f_x)^2 + (f_y)^2}\,dA \)
where \( D \) is the region over which we are integrating, \( f_x \) is the partial derivative of \( f \) with respect to \( x \), and \( f_y \) is the partial derivative of \( f \) with respect to \( y \). Commonly, an architect will want to know the volume of a room in order to alter it or make sure it meets a certain requirement from a buyer or agency. To do this, the same generalization we just made can be done to the single-variable calculus integral for the area under a curve:
\( V = \iint_D f(x,y)\,dA \)
[Include a diagram depicting a curved surface and the volume between it and the base plane]
We can imagine projecting a surface down to the \( xy \)-plane as we would with a curve to the \( x \)-axis. These higher-dimensional integrals can be used to calculate the area of a room with an oddly-shaped ceiling, or perhaps the amount of water in a wavy pool.
With environmental awareness increasing every day, architects are now focused on designing more sustainable, energy-efficient buildings. Calculus can be used in the analysis of heat transfer within structures. Differential equations can be used to model the flow of heat through materials, helping architects optimize insulation strategies and HVAC (heating, ventilation, air conditioning) systems to maintain comfortable indoor environments while minimizing energy consumption.
The applications of calculus to architecture are vast, widely explored, and still evolving. When developing buildings, architects and engineers use analytical and numerical calculus to find exact or approximate measurements, including shadows, surface area, volume, solar panel angles, structural integrity, and more. As new and exciting technologies continue to develop at astonishing rates, architects will have more tools at their disposal. The development of more advanced 3D printing techniques, for example, will eventually make a large impact on an architect’s budget analysis, transforming the way they think about optimization. With the recent rise of hyper-sophisticated AI, future computational models will quickly eclipse our current ones. Though the work of an architect will inevitably change, the omnipresence of calculus in this field will not.